En general, un sistema con m ecuaciones lineales y n incógnitas puede ser escrito en forma normal como:
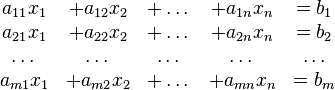
Donde  son las incógnitas y los números
son las incógnitas y los números  son los coeficientes del sistema sobre el cuerpo
son los coeficientes del sistema sobre el cuerpo ![\mathbb{K}\ [= \R, \mathbb{C}, \dots]](https://upload.wikimedia.org/math/d/d/1/dd172d7f353ca18a891dda59a0d44cc5.png) . Es posible reescribir el sistema separando con coeficientes con notación matricial:
. Es posible reescribir el sistema separando con coeficientes con notación matricial:
son las incógnitas y los números son los coeficientes del sistema sobre el cuerpo . Es posible reescribir el sistema separando con coeficientes con notación matricial:(1)
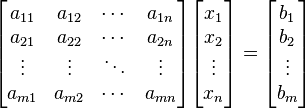
Si representamos cada matriz con una única letra obtenemos:

Donde A es una matriz m por n, x es un vector columna de longitud n y b es otro vector columna de longitud m. El sistema de eliminación de Gauss-Jordan se aplica a este tipo de sistemas, sea cual sea el cuerpo del que provengan los coeficientes. La matriz A se llama matriz de coeficientes de este sistema lineal. A b se le llama vector de términos independientes del sistema y a x se le llama vector de incógnitas.
No hay comentarios:
Publicar un comentario